1. Etcd-raft选举优化
1.0 背景
在leader选举方面,etcd/raft对《In Search of an Understandable Consensus Algorithm (Extended Version)》中介绍的基本Raft算法做了三种优化。这三种优化都在Diego Ongaro的博士论文《CONSENSUS: BRIDGING THEORY AND PRACTICE》的6.4 Processing read-only queries more efficiently和9.6 Preventing disruptions when a server rejoins the cluster中有提到。
etcd/raft实现的与选举有关的优化有Pre-Vote、Check Quorum、和Leader Lease。在这三种优化中,只有Pre-Vote和Leader Lease最初是对选举过程的优化,Check Quorum起初是为了更高效地实现线性一致性读(Linearizable Read)而做出的优化。
除此之外,etcd/raft还实现了Leader Transfer,即主动地进行leader的交接。其实现方式比较简单,只需要让希望成为新leader节点主动发起投票请求即可(原Leader发送MsgTimeout消息)。需要注意的是,Leader Transfer不保证交接一定成功,只有目标节点能够得到数量达到quorum的选票时才能当选leader,Leader Transfer类型的投票不受Pre-Vote、Check Quorum、Leader Lease机制约束。
1.1 Pre-Vote
如下图所示,当Raft集群的网络发生分区时,会出现节点数达不到quorum(达成共识至少需要的节点数)的分区,如图中的Partition 1。
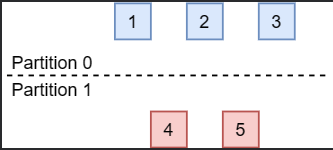
在节点数能够达到quorum的分区中,选举流程会正常进行,该分区中的所有节点的term最终会稳定为新选举出的leader节点的term。不幸的是,在节点数无法达到quorum的分区中,如果该分区中没有leader节点,因为节点总是无法收到数量达到quorum的投票而不会选举出新的leader,所以该分区中的节点在election timeout超时后,会增大term并发起下一轮选举,这导致该分区中的节点的term会不断增大。
如果网络一直没有恢复,这是没有问题的。但是,如果网络分区恢复,此时,达不到quorum的分区中的节点的term值会远大于能够达到quorum的分区中的节点的term,这会导致能够达到quorum的分区的leader退位(step down)并增大自己的term到更大的term,使集群产生一轮不必要的选举。
Pre-Vote机制就是为了解决这一问题而设计的,其解决的思路在于不允许达不到quorum的分区正常进入投票流程,也就避免了其term号的增大。为此,Pre-Vote引入了“预投票”,也就是说,当节点election timeout超时时,它们不会立即增大自身的term并请求投票,而是先发起一轮预投票,投票请求的term是r.term+1,但注意节点本身的term并不会增加。
收到预投票请求的节点不会退位。只有当节点收到了达到quorum的预投票响应时,节点才能增大自身term号并发起投票请求。这样,达不到quorum的分区中的节点永远无法增大term,也就不会在分区恢复后引起不必要的一轮投票。
1.2 Check Quorum
在Raft算法中,保证线性一致性读取的最简单的方式,就是讲读请求同样当做一条Raft提议,通过与其它日志相同的方式执行,因此这种方式也叫作Log Read。显然,Log Read的性能很差。而在很多系统中,读多写少的负载是很常见的场景。因此,为了提高读取的性能,就要试图绕过日志机制。
但是,直接绕过日志机制从leader读取,可能会读到陈旧的数据,也就是说存在stale read的问题。在下图的场景中,假设网络分区前,Node 5是整个集群的leader。在网络发生分区后,Partition 0分区中选举出了新leader,也就是图中的Node 1。
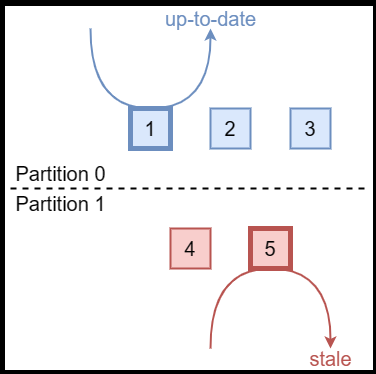
但是,由于网络分区,Node 5无法收到Partition 0中节点的消息,Node 5不会意识到集群中出现了新的leader。此时,虽然它不能成功地完成日志提交,但是如果读取时绕过了日志,它还是能够提供读取服务的。这会导致连接到Node 5的client读取到陈旧的数据。
Check Quorum可以减轻这一问题带来的影响,其机制也非常简单:让leader每隔一段时间主动地检查follower是否活跃。如果活跃的follower数量达不到quorum,那么说明该leader可能是分区前的旧leader,所以此时该leader会主动退位转为follower。
需要注意的是,Check Quorum并不能完全避免stale read的发生,只能减小其发生时间,降低影响。如果需要严格的线性一致性,需要通过其它机制实现。
- ReadIndex机制可以完全避免stale read,但是由于每次都需要Leader广播一轮心跳,因此性能会有些许损耗。
- LeaseRead机制仅仅依靠CheckQuorum机制,这种方法有一定的风险,属于牺牲一定正确性换取性能。
1.3 Leader Lease
分布式系统中的网络环境十分复杂,有时可能出现网络不完全分区的情况,即整个整个网络拓补图是一个连通图,但是可能并非任意的两个节点都能互相访问。
这种现象不止会出现在网络故障中,还会出现在成员变更中。在通过ConfChange移除节点时,不同节点应用该ConfChange的时间可能不同,这也可能导致这一现象发生。
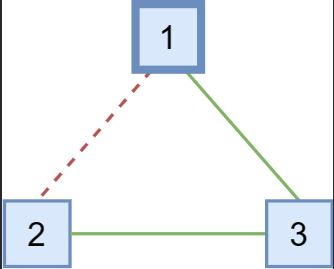
在上图的场景下,Node 1与Node 2之间无法通信。如果它们之间的通信中断前,Node 1是集群的leader,在通信中断后,Node 2无法再收到来自Node 1的心跳。因此,Node 2会开始选举。如果在Node 2发起选举前,Node 1和Node 3中都没有新的日志,那么Node 2仍可以收到能达到quorum的投票(来自Node 2本身的投票和来自Node 3的投票),并成为leader。
Leader Lease机制对投票引入了一条新的约束以解决这一问题:当节点在election timeout超时前,如果收到了leader的消息,那么它不会为其它发起投票或预投票请求的节点投票。也就是说,Leader Lease机制会阻止了正常工作的集群中的节点给其它节点投票。
Leader Lease需要依赖Check Quorum机制才能正常工作。接下来笔者通过一个例子说明其原因。
假如在一个5个节点组成的Raft集群中,出现了下图中的分区情况:Node 1与Node 2互通,Node 2、Node 3、Node 4之间两两互通、Node 5与任一节点不通。在网络分区前,Node 1是集群的leader。
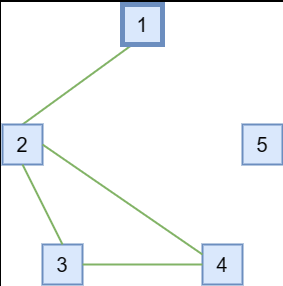
在既没有Leader Lease也没有Check Quorum的情况下,Node 3、Node 4会因收不到leader的心跳而发起投票,因为Node 2、Node 3、Node 4互通,该分区节点数能达到quorum,因此它们可以选举出新的leader。
而在使用了Leader Lease而不使用Check Quorum的情况下,由于Node 2仍能够收到原leader Node 1的心跳,受Leader Lease机制的约束,它不会为其它节点投票。这会导致即使整个集群中存在可用节点数达到quorum的分区,但是集群仍无法正常工作。
而如果同时使用了Leader Lease和Check Quorum,那么在上图的情况下,Node 1会在election timeout超时后因检测不到数量达到quorum的活跃节点而退位为follower。这样,Node 2、Node 3、Node 4之间的选举可以正常进行。
1.4 引入的新问题与解决方案
引入Pre-Vote和Check Quorum(etcd/raft的实现中,开启Check Quorum会自动开启Leader Lease)会为Raft算法引入一些新的问题。
当一个节点收到了term比自己低的消息时,原本的逻辑是直接忽略该消息,因为term比自己低的消息仅可能是因网络延迟的迟到的旧消息。然而,开启了这些机制后,在如下的场景中会出现问题:
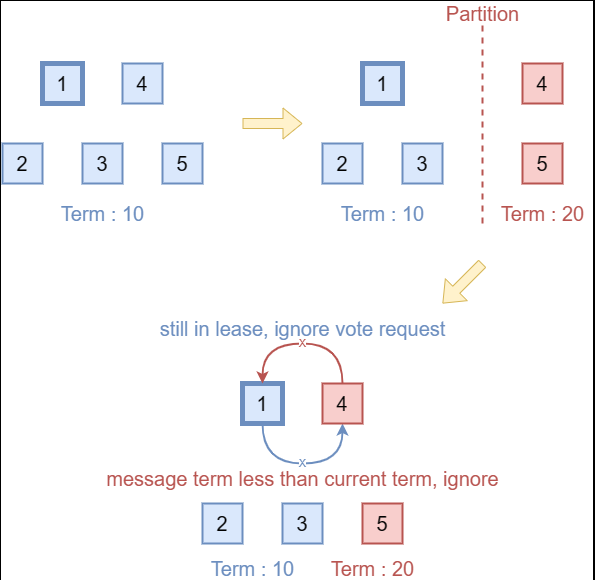
场景1: 如上图所示,在开启了Check Quorum / Leader Lease后(假设没有开启Pre-Vote,Pre-Vote的问题在下一场景中讨论),数量达不到quorum的分区中的leader会退位,且该分区中的节点永远都无法选举出leader,因此该分区的节点的term会不断增大。当该分区与整个集群的网络恢复后,由于开启了Check Quorum / Leader Lease,即使该分区中的节点有更大的term,由于原分区的节点工作正常,它们的选举请求会被丢弃。同时,由于该节点的term比原分区的leader节点的term大,因此它会丢弃原分区的leader的请求。这样,该节点永远都无法重新加入集群,也无法当选新leader。(详见issue #5451、issue #5468)。
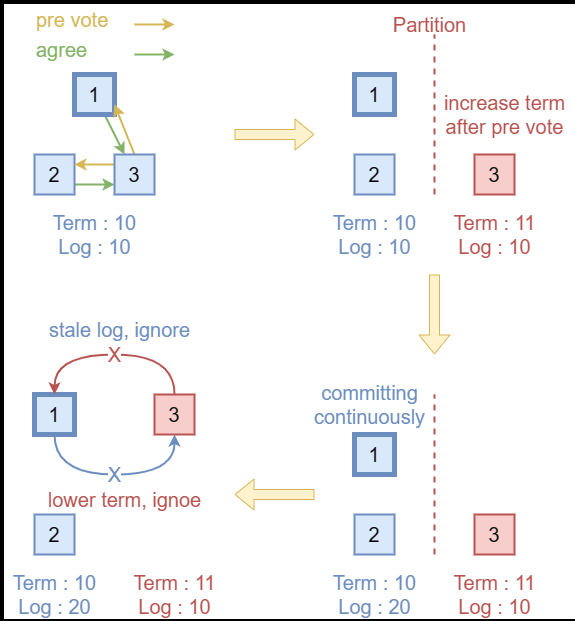
场景2: Pre-Vote机制也有类似的问题。如上图所示,假如发起预投票的节点,在预投票通过后正要发起正式投票的请求时出现网络分区。此时,该节点的term会高于原集群的term。而原集群因没有收到真正的投票请求,不会更新term,继续正常运行。在网络分区恢复后,原集群的term低于分区节点的term,但是日志比分区节点更新。此时,该节点发起的预投票请求因没有日志落后会被丢弃,而原集群leader发给该节点的请求会因term比该节点小而被丢弃。同样,该节点永远都无法重新加入集群,也无法当选新leader。(详见issue #8501、issue #8525)。
场景3: 在更复杂的情况中,比如,在变更配置时,开启了原本没有开启的Pre-Vote机制。此时可能会出现与上一条类似的情况,即可能因term更高但是log更旧的节点的存在导致整个集群的死锁,所有节点都无法预投票成功。这种情况比上一种情况更危险,上一种情况只有之前分区的节点无法加入集群,在这种情况下,整个集群都会不可用。(详见issue #8501、issue #8525)。
为了解决以上问题,节点在收到term比自己低的请求时,需要做特殊的处理。处理逻辑也很简单:
- 如果收到了term比当前节点term低的leader的消息,且集群开启了Check Quorum / Leader Lease或Pre-Vote,那么发送一条term为当前term的消息,令term低的节点成为follower。(针对场景1、场景2)
- 对于term比当前节点term低的预投票请求,无论是否开启了Check Quorum / Leader Lease或Pre-Vote,都要通过一条term为当前term的消息,迫使其转为follower并更新term。(针对场景3)
2. Etcd-raft ReadIndex优化
Raft算法的目标是实现Linearizability语义,需要注意的是,线性一致性的实现不仅与Raft算法本身有关,还与其上层的状态机有关。
即使Raft算法本身保证了其日志的故障容错有序共识,但是在通过Raft算法实现系统时,仍会存在有关消息服务质量(Quality of Service,QoS;如至多一次、至少一次、恰好一次等语义问题)。如果状态机模块什么都不做,那么Raft算法会提供至少一次语义,即一个命令不会丢失,但是可能会多次提交或应用,因此上层状态机必须做点什么来确保Linearizability语义。
此外,这同样需要客户端的配合,客户端也需要做一些事情,从而确保状态机可以即时的丢弃一些无用的信息,可以更好的提供服务。
下面简要的提一下状态机和客户端应该做什么,但是我们的重点是在raft算法中应该做什么来实现ReadIndex优化。
2.0 状态机/客户端的工作(来自raft论文)
为了在 Raft 中实现线性可读写,服务器必须过滤掉重复的请求。基本思想是服务器保存客户端操作的结果,并使用它们来跳过多次执行相同请求。为了实现这一点,给每个客户端分配一个唯一标识符,并让客户端为每个命令分配唯一的序列号。每个服务器的状态机为每个客户端维护一个会话。该会话跟踪对于特定客户端而言已处理的最新序列号,以及相关的响应。如果服务器收到一个序列号已经执行过的命令,它会立即响应,而不会重新执行请求。
在对重复请求进行过滤的情况下,Raft 提供了线性可读写。Raft 日志提供了一个命令在每个服务器上应用的串行顺序。根据命令首次出现在 Raft 日志中的时间,命令根据其首次出现在 Raft 日志中的时间立即且仅生效一次,因为如上所述,任何在后续出现的重复命令都会被状态机过滤掉。
这就意味着每个不同的proposal可以被commit多次,在log中出现多次,但永远只会被apply一次。
这种方法还推广到允许来自单个客户端的并发请求。客户端的会话不仅跟踪客户端的最新序列号和响应,还包括一组序列号和响应对。在每个请求中,客户端包含它尚未收到响应的最低序列号,然后状态机丢弃所有更低的序列号(相比于客户端维护的尚未收到响应的最低序列号更低)的响应。
2.1 Log Read(朴素方法)
通过Raft算法实现线性一致性读最简单的方法就是让读请求也走日志机制。即将读请求也作为一条普通的Raft日志,在应用该日志时将读取的状态返回给客户端。这种方法被称为Log Read。
Log Read的实现非常简单,其仅依赖Raft算法已有的机制。但显然,Log Read算法的延迟、吞吐量都很低。因为其既有达成一轮共识所需的开销,又有将这条Raft日志落盘的开销。因此,为了优化只读请求的性能,就要想办法绕过Raft算法完整的日志机制。然而,直接绕过日志机制存在一致性问题,因为Raft算法是基于quorum确认的算法,因此即使日志被提交,也无法保证所有节点都能反映该应用了该日志后的结果。
在Raft算法中,所有的日志写入操作都需要通过leader节点进行。只有leader确认一条日志复制到了quorum数量的节点上,才能确认日志被提交。因此,只要仅通过leader读取数据,那么一定是能保证只读操作的线性一致性的。
然而,在一些情况下,leader可能无法及时发现其已经不是合法的leader。这一问题在介绍Raft选举算法的Check Quorum优化是讨论过这一问题。当网络分区出现时,处于小分区的leader可能无法得知集群中已经选举出了新的leader。如果此时原leader还在为客户端提供只读请求的服务,可能会出现stale read的问题。为了解决这一问题,《CONSENSUS: BRIDGING THEORY AND PRACTICE》给出了两个方案:Read Index和Lease Read。
2.2 ReadIndex
显然,只读请求并没有需要写入的数据,因此并不需要将其写入Raft日志,而只需要关注收到请求时leader的commit index。只要在该commit index被应用到状态机后执行读操作,就能保证其线性一致性。因此使用了ReadIndex的leader在收到只读请求时,会按如下方式处理:
- 记录当前的commit index,作为read index。
- 向集群中的所有节点广播一次心跳,如果收到了数量达到quorum的心跳响应,leader可以得知当收到该只读请求时,其一定是集群的合法leader。
- 继续执行,直到leader本地的apply index大于等于之前记录的read index。此时可以保证只读操作的线性一致性。
- 让状态机执行只读操作,并将结果返回给客户端。
可以看出,ReadIndex的方法只需要一轮心跳广播,既不需要落盘,且其网络开销也很小。ReadIndex方法对吞吐量的提升十分显著,但由于其仍需要一轮心跳广播,其对延迟的优化并不明显。
需要注意的是,实现ReadIndex时需要注意一个特殊情况。当新leader刚刚当选时,其commit index可能并不是此时集群的commit index。因此,需要等到新leader至少提交了一条日志时,才能保证其commit index能反映集群此时的commit index。幸运的是,新leader当选时为了提交非本term的日志,会提交一条空日志。因此,leader只需要等待该日志提交就能开始提供ReadIndex服务,而无需再提交额外的空日志。
通过ReadIndex机制,还能实现follower read。当follower收到只读请求后,可以给leader发送一条获取read index的消息,当leader通过心跳广播确认自己是合法的leader后,将其记录的read index返回给follower,follower等到自己的apply index大于等于其收到的read index后,即可以安全地提供满足线性一致性的只读服务。
2.3 Lease Read
ReadIndex虽然提升了只读请求的吞吐量,但是由于其还需要一轮心跳广播,因此只读请求延迟的优化并不明显。而Lease Read在损失了一定的安全性的前提下,进一步地优化了延迟。
Lease Read同样是为了确认当前的leader为合法的leader,但是这种方法中,leader是通过心跳与时钟来检查自身合法性的。leader并不会专门的为ReadIndex请求向集群中广播一次心跳。
当leader的heartbeat timeout超时时,其需要向所有节点广播心跳消息。设心跳广播前的时间戳为start,当leader收到了至少quorum数量的节点的响应时,该leader可以认为其lease的有效期为[start,start+election timeout/clock drift bound]。 \(LeaseInvalidTime = [start, start+election timeout/clock drift bound]\) 因为如果在start时发送的心跳获得了至少quorum数量节点的响应,那么至少要在election timeout后,集群才会选举出新的leader。但是,由于不同节点的cpu时钟可能有不同程度的漂移,这会导致在一个很小的时间窗口内,即使leader认为其持有lease,但集群已经选举出了新的leader。这与Raft选举优化Leader Lease存在同样的问题。因此,一些系统在实现Lease Read时缩小了leader持有lease的时间,选择了一个略小于election timeout的时间,以减小时钟漂移带来的影响。
当leader持有lease时,leader认为此时其为合法的leader,因此可以直接将其commit index作为read index。后续的处理流程与ReadIndex相同。
需要注意的是,与Leader Lease相同,Lease Read机制同样需要在选举时开启Check Quorum机制。其原因与Leader Lease相同,详见深入浅出etcd/raft —— 0x03 Raft选举 - 叉鸽 MrCroxx 的博客,这里不再赘述。
有些文章中常常将实现线性一致性只读请求优化Lease Read机制和选举优化Leader Lease混淆。
Leader Lease是保证follower在能收到合法的leader的消息时拒绝其它candidate,以避免不必要的选举的机制。
Lease Read是leader为确认自己是合法leader,以保证只通过leader为只读请求提供服务时,满足线性一致性的机制。
3. etcd-raft中只读请求的实现
3.1 etcd/raft中ReadIndex方法的使用
在etcd/raft中,使用ReadIndex还是Lease Read方法由通过raft的配置Config的ReadOnlyOption字段决定的,对应于我们上面的介绍,该字段的取值有两种:ReadOnlySafe与ReadOnlyLeaseBased,分别对应ReadIndex方法与Lease Read方法:
// ReadOnlyOption specifies how the read only request is processed.
// ReadOnlyOption指定如何处理只读请求。
//
// ReadOnlySafe guarantees the linearizability of the read only request by
// communicating with the quorum. It is the default and suggested option.
// ReadOnlySafe通过与法定人数通信,保证了只读请求的线性化。这是默认和建议的选项。
//
// ReadOnlyLeaseBased ensures linearizability of the read only request by
// relying on the leader lease. It can be affected by clock drift.
// If the clock drift is unbounded, leader might keep the lease longer than it
// should (clock can move backward/pause without any bound). ReadIndex is not safe
// in that case.
// CheckQuorum MUST be enabled if ReadOnlyOption is ReadOnlyLeaseBased.
// ReadOnlyLeaseBased通过依赖领导者租约来保证只读请求的线性化。它可能会受到时钟漂移的影响。
// 如果时钟漂移是无界的,领导者可能会保留比规定时间来说更长的租约(时钟可以在没有任何限制的情况下向后移动/暂停)。
// 在这种情况下,ReadIndex是不安全的。
// 如果ReadOnlyOption是ReadOnlyLeaseBased,则必须启用CheckQuorum。
ReadOnlyOption ReadOnlyOption
无论是ReadIndex方法还是Lease Read方法,都需要获取read index。Node节点的的ReadIndex()方法就是用来获取read index的方法,这是Node提供的必须要定义的接口:
// ReadIndex request a read state. The read state will be set in the ready.
// Read state has a read index. Once the application advances further than the read
// index, any linearizable read requests issued before the read request can be
// processed safely. The read state will have the same rctx attached.
// Note that request can be lost without notice, therefore it is user's job
// to ensure read index retries.
//
// ReadIndex请求一个read state。read state将设置在ready中。read state具有一个read index。
// 一旦应用程序进度超过read index,那么在发出read请求之前的任何线性读请求都可以安全地处理。
// read state将附加相同的rctx。
//
// 请注意,请求可能会在没有通知的情况下丢失,因此用户需要确保read index重试。
ReadIndex(ctx context.Context, rctx []byte) error
当etcd/raft模块的调用者需要获取read index时,需要调用ReadIndex方法。ReadIndex方法不会直接返回read index,而是会在后续的Ready结构体的ReadStates字段中返回多次ReadIndex调用对应的ReadState。
该字段定义在Ready结构体中:
// ReadStates can be used for node to serve linearizable read requests locally
// when its applied index is greater than the index in ReadState.
// Note that the readState will be returned when raft receives msgReadIndex.
// The returned is only valid for the request that requested to read.
// 当节点的appliedIndex大于ReadState中的索引时,ReadStates可以用于节点本地提供线性读请求。
// 请注意,当raft接收到msgReadIndex时,将返回readState。返回值仅对请求读取的请求有效。
ReadStates []ReadState
ReadState结构体内部是这样的:
// ReadState provides state for read only query.
// It's caller's responsibility to call ReadIndex first before getting
// this state from ready, it's also caller's duty to differentiate if this
// state is what it requests through RequestCtx, eg. given a unique id as
// RequestCtx
// ReadState为只读查询提供状态。
// 在从ready中获取此状态之前,调用者有责任首先调用ReadIndex,调用者还有责任区分此状态是否是通过RequestCtx请求的,
// 例如,通过RequestCtx给定唯一ID
type ReadState struct {
Index uint64 // 当前raft状态机的提交索引
RequestCtx []byte
}
为了让调用者能够区分ReadState是哪次调用的结果,ReadIndex方法需要传入一个唯一的rctx字段进行标识,之后相应的ReadState的RequestCtx字段会透传rctx的值,以便调用者区分多次调用的结果。
当调用者应用的日志的index大于等于ReadState的Index字段的值时,就可以安全地执行相应的只读请求并返回结果。
3.2 etcd/raft中获取read index的实现
3.2.1 readOnly结构体
在分析etcd/raft中获取read index的实现使用了raft结构体中的两个字段:readState与readOnly。readStates字段是已经获取的read index,etcd/raft返回的下一个Ready结构体的ReadStates字段会获取readStates字段中的全量数据并清空该字段。而readOnly字段就是一个readOnly结构体的指针。readOnly结构体是leader仅使用ReadIndex时,用来记录等待心跳确认的read index的结构体,其声明如下:
// pendingReadIndex和readIndexQueue字段只有在ReadOnlySafe模式下才会使用
// 在ReadOnlySafe状态下,每个ReadIndex请求都需要Leader广播一轮心跳消息,等待大多数节点的确认
type readOnly struct {
// 处理ReadOnly请求的选项:ReadOnlySafe、ReadOnlyLeaseBased
option ReadOnlyOption
// pendingReadIndex记录了所有的只读请求,key是请求的上下文,value是请求的状态
pendingReadIndex map[string]*readIndexStatus
// readIndexQueue记录了所有的只读请求的上下文(requestCtx),按照请求的顺序排列
readIndexQueue []string
}
readOnly结构体的option字段记录了etcd/raft配置中实现read index的方法。
readIndexQueue是多次调用ReadIndex方法时产生的rctx参数队列,其反映了ReadIndex的调用顺序。
pendingReadIndex是rctx到其相应的状态readIndexStatus的映射,是按照readIndexQueue中的内容为key,记录的相应的readIndexStatus。
readIndexStatus结构体的req字段记录了该rctx对应的原消息(在发送该消息的响应时需要用到),index字段记录了待确认的read index的值,ack字段记录了已收到的确认该read index的心跳响应。
type readIndexStatus struct {
// req是readOnly结构体中的requestCtx对应的原始只读请求消息
req pb.Message
// index是待处理的只读请求的索引,需要等到appliedIndex大于等于index时才能处理
index uint64
// NB: this never records 'false', but it's more convenient to use this
// instead of a map[uint64]struct{} due to the API of quorum.VoteResult. If
// this becomes performance sensitive enough (doubtful), quorum.VoteResult
// can change to an API that is closer to that of CommittedIndex.
//
// NB: 这里永远不会记录'false',但是由于quorum.VoteResult的API,使用map[uint64]struct{}比较方便。
// 如果这变得足够重要(不太可能),quorum.VoteResult可以更改为接近CommittedIndex的API。
// 只有ReadOnlySafe模式下才会使用这个字段,因为每个ReadIndex请求都需要等待大多数节点的确认
acks map[uint64]bool
}
如果readOnly的option字段的值为ReadOnlyLeaseBased,说明read index的实现使用了Lease Read,不需要在获取read index前广播心跳,因此不会用到pendingReadIndex与readIndexQueue字段。
readOnly还封装了如下方法:
| 方法 | 描述 |
|---|---|
addRequest(index uint64, m pb.Message) |
在广播用来确认read index的心跳消息前,需要调用该方法将该read index加入待确认队列。(ReadOnlySafe模式下使用此方法) |
recvAck(id uint64, context []byte) map[uint64]bool |
当收到确认read index的心跳响应时,需要调用该方法更新该read index的确认状态,该方法会返回收到的确认心跳响应的发送者的id集合。(ReadOnlySafe模式下使用此方法) |
advance(m pb.Message) []*readIndexStatus |
当有read index得到了达到quorum数量节点的ack时,调用该方法返回相应的ReadState,并从待确认的队列中移除相应的read index及其状态。该方法支持批量与流水线操作,因为如果队列中靠后的read index被确认,则其之前的read index也可以确认,因此该方法会返回所有已确认的ReadState。 |
lastPendingRequestCtx() string |
该方法用来获取待确认的最后一条read index对应的rctx。在heartbeat timeout超时构造心跳消息时,其携带的read index标识为最后一条待确认的read index的标识,因为如果队列中靠后的read index被确认,则其之前的read index也可以确认,该方法是为支持批量与流水线操作而设计的。 |
3.2.2 获取read index流程与实现
Node接口的ReadIndex方法会为Raft状态机应用一条MsgReadIndex消息。etcd/raft实现了Follower Read(1.2节介绍了Follower Read的简单实现),即follower需要将获取read index的请求转发给leader,leader确认自己是合法的leader后将read index返回给follower,然后follower根据其自己的apply index与read index确定什么时候可以执行只读请求。因此,如果应用MsgReadIndex消息的节点是follower,其会将该请求转发给leader:
// stepFollower
// ... ...
case pb.MsgReadIndex:
if r.lead == None {
r.logger.Infof("%x no leader at term %d; dropping index reading msg", r.id, r.Term)
return nil
}
m.To = r.lead
r.send(m)
当leader处理MsgReadIndex请求时(可能来自本地节点,也可能来自follower),其会执行如下逻辑:
case pb.MsgReadIndex:
// only one voting member (the leader) in the cluster
// 集群中只有一个投票成员(领导者)
// 那么直接返回ReadIndexResp消息,即直接处理该ReadIndex消息
if r.trk.IsSingleton() {
if resp := r.responseToReadIndexReq(m, r.raftLog.committed); resp.To != None {
r.send(resp)
}
return nil
}
// Postpone read only request when this leader has not committed
// any log entry at its term.
// 当该leader在其term中没有提交任何日志条目时,推迟只读请求
if !r.committedEntryInCurrentTerm() {
r.pendingReadIndexMessages = append(r.pendingReadIndexMessages, m)
return nil
}
sendMsgReadIndexResponse(r, m)
return nil
sendMsgReadIndexResponse(r, m)的内部实现:
func sendMsgReadIndexResponse(r *raft, m pb.Message) {
// thinking: use an internally defined context instead of the user given context.
// We can express this in terms of the term and index instead of a user-supplied value.
// This would allow multiple reads to piggyback on the same message.
// 思考:使用内部定义的上下文,而不是用户给定的上下文。
// 我们可以根据任期和索引来表达这一点,而不是用户提供的值。
// 这将允许多个读取附加在同一消息上。
switch r.readOnly.option {
// If more than the local vote is needed, go through a full broadcast.
// 如果需要的不仅仅是本地的投票,那么就需要进行全广播。
case ReadOnlySafe:
r.readOnly.addRequest(r.raftLog.committed, m)
// The local node automatically acks the request.
r.readOnly.recvAck(r.id, m.Entries[0].Data)
r.bcastHeartbeatWithCtx(m.Entries[0].Data)
case ReadOnlyLeaseBased:
if resp := r.responseToReadIndexReq(m, r.raftLog.committed); resp.To != None {
r.send(resp)
}
}
}
首先,leader检查当前是否是以单节点模式运行的(即voter集合是否只有一个节点,但可以有任意数量的learner),如果是,那么该leader一定是合法的leader,因此可以直接返回相应的ReadState。
返回ReadState的方法为responseToReadIndexReq方法:
- 该方法会判断获取read index的请求是来自leader本地还是来自follower,如果来自本地则直接将相应的
ReadState追加到当前raft结构体的readStates字段中,并返回空消息; - 如果请求时来自follower,该方法会返回一条用来发送给相应follower的
MsgReadIndexResp消息。因此,如果responseToReadIndexReq方法返回的请求的To字段为0,不需要做额外的处理;如果To字段非0,则需要将该消息放入信箱等待发送。
接着,leader需要判断当前的term是否提交过日志,这是为了解决1.2节中提到的新leader当选时commit index落后的问题。如果leader在当前term还没提交过消息,则其会将该ReadIndex消息放到pendingReadIndexMessages结构体中:
// raft 结构体
// ...
// pendingReadIndexMessages is used to store messages of type MsgReadIndex
// that can't be answered as new leader didn't committed any log in
// current term. Those will be handled as fast as first log is committed in
// current term.
// pendingReadIndexMessages用于存储MsgReadIndex类型的消息,
// 因为新领导者在当前任期中没有提交任何日志,所以无法回答这些消息。
// 这些消息将在当前任期中提交第一条日志时尽快处理。
pendingReadIndexMessages []pb.Message
然后,leader会根据这条ReadIndex消息中获取read index的方法执行不同的逻辑:
-
当使用Lease Read时,leader可以直接返回相应的
ReadState,因为etcd/raft的Lease Read是通过Check Quorum实现的。即只要leader没有退位,说明其仍持有lease;而当leader无法为lease续约时,Check Quorum机制会让leader退位为follower,其也就不会通过stepLeader方法处理MsgReadIndex请求。 -
当仅使用ReadIndex时:
- leader会将当前的commit index作为read index并通过
readOnly的addRequest方法将其加入到待确认的队列中。 - 然后leader节点自己先确认该read index,然后广播心跳等待其它节点确认该read index。
- leader在主动请求确认read index时,发送的心跳消息携带的
rctx就是该read index相应的rctx;而当leader因heartbeat timeout超时而广播心跳消息时,携带的是待确认的最后一条read index相应的rctx,以批量确认所有待确认的read index。
- leader会将当前的commit index作为read index并通过
承接上面的广播心跳时携带的不同RequestCtx消息的机制,我们来看一下bcastHeartbeat()和bcastHeartbeatWithCtx(ctx []byte)两个消息:
// bcastHeartbeat sends RPC, without entries to all the peers.
// bcastHeartbeat向所有对等节点发送RPC,不包含任何entries,
func (r *raft) bcastHeartbeat() {
lastCtx := r.readOnly.lastPendingRequestCtx()
if len(lastCtx) == 0 {
r.bcastHeartbeatWithCtx(nil)
} else { // 若存在,携带最后一个readIndex请求的ctx
r.bcastHeartbeatWithCtx([]byte(lastCtx))
}
}
func (r *raft) bcastHeartbeatWithCtx(ctx []byte) {
r.trk.Visit(func(id uint64, _ *tracker.Progress) {
if id == r.id {
return
}
r.sendHeartbeat(id, ctx)
})
}
此时Leader向集群中所有的节点发送了携带ReadIndex的RequestCtx的消息,当Leader收到pb.MsgHeartbeatResp类型的消息时,会判断是否收到了大多数节点的回复:
// stepLeader
// ...
case pb.MsgHeartbeatResp:
// 若readOnly的机制不为ReadOnlySafe,说明ReadIndex请求不需要每次都CheckQuorum,直接返回
// 消息的Context为空,意味着未携带ReadIndex请求,则直接返回
if r.readOnly.option != ReadOnlySafe || len(m.Context) == 0 {
return nil
}
// 若当前leader收到心跳响应后未达到Quorum,则直接返回
if r.trk.Voters.VoteResult(r.readOnly.recvAck(m.From, m.Context)) != quorum.VoteWon {
return nil
}
// 首先获取所有符合条件的ReadIndex消息
// 一个RequestCtx唯一对应一个ReadIndex消息,当某条ReadIndex消息的Quorum达到时,说明之前的ReadIndex也可以被处理
rss := r.readOnly.advance(m)
for _, rs := range rss {
if resp := r.responseToReadIndexReq(rs.req, rs.index); resp.To != None {
r.send(resp)
}
}
当仅使用ReadIndex时,leader在收到心跳响应时会更新待确认的read index的状态。如果read index收到了达到quorum数量的相应,则可以确认该read index及其之前的所有read index,返回相应的ReadState。
3.3 总结
本文介绍了etcd/raft中只读请求算法优化与实现。etcd/raft中只读请求优化几乎完全是按照论文实现的。在其它的一些基于Raft算法的系统中,其实现的方式可能稍有不同,如:不是通过Check Quorum实现leader的lease,而是通过日志复制消息为lease续约,且lease的时间也小于election timeout,以减小时钟漂移对一致性的影响。