Synchronization 2: Semaphores (Con’t) Lock Implementation, Atomic Instructions
Context Switching behaviors between thread
讲述了一个不改变进程的中断,或者一个系统调用是如何发生的:
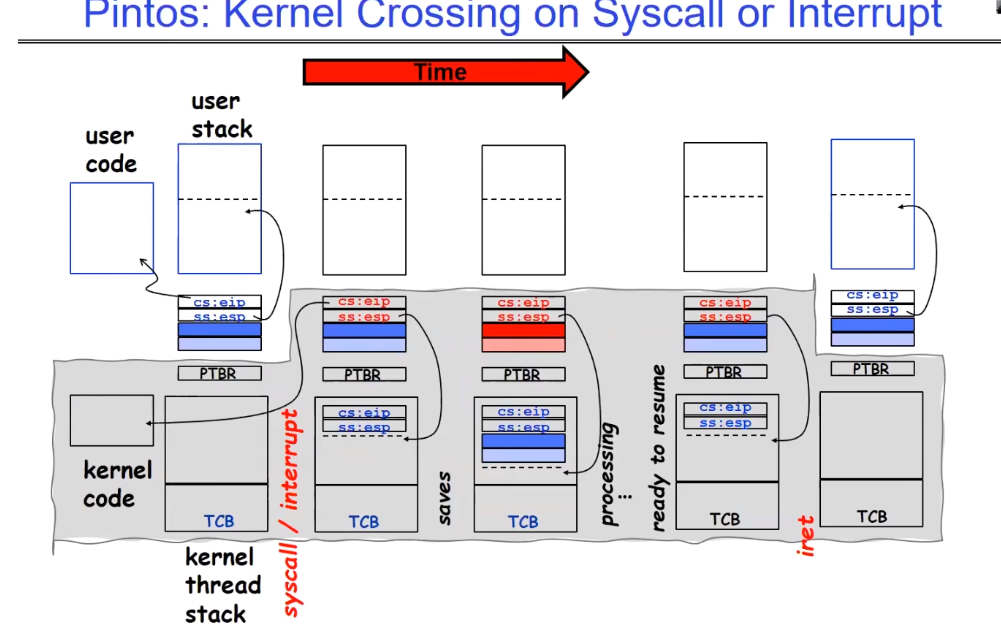
ip是instruction ptr,sp是stack ptr,PTBR是page table base register。ip保存了当前线程的执行进度,指向用户代码段;sp指向当前用户栈的执行进度。当发生中断或者上下文切换时,内核态的对应线程会将ip和sp、寄存器、当前用户栈内容等保存到该用户对应的TCB中(保存寄存器的行为由硬件完成),之后就可以转去处理别的线程。注意这里仍然是同一个进程。
在处理别的线程之前,我们需要将PTBR和TCB替换为另一个线程的信息,之后就像往常一样加载并运行即可。
一段时间过后,该线程可以恢复了,此时内核已经准备好重新处理这个线程了,首先内核态会从对应的TCB中读取相关的寄存器和用户栈内容,之后返回到用户态,此时就可以继续执行之前被中断的程序了。
红黑树这种数据结构在Linux中被广泛使用,网上有很多资料,可以看看是为什么。
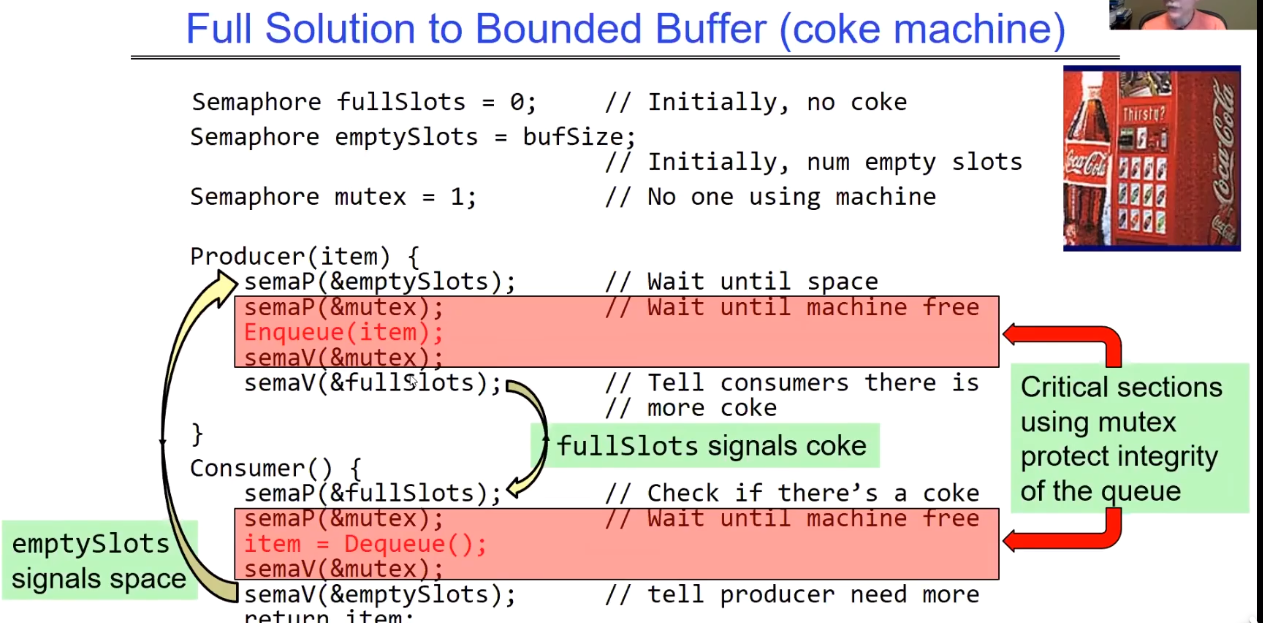
接下来教授讲了多生产者消费者的问题。以此来引出我们今天要学习的主题,更高级别的同步原语。semaphores在上节课已经讲过了。
Bounded Buffer solution
Recall:what is lock
同步的核心思想就是通过等待来协调,我们的目的是让等待的线程尽可能减少等待,且等待的时候不要占着CPU资源(意味着线程只要需要等待,就让它去休眠),这样可以让别的程序来运行并取得进展。
- 线程休眠:本质上是将该线程从调度队列放入等待队列。
- 自旋等待:while循环一直等待,这会占着CPU资源不做事情,这很愚蠢。
- semaphores的P操作:P操作在等到时,具体会做哪种等待方式,取决于我们的实现,一般是线程休眠。
How can we implement locks based on hardware
我们不想用那种复杂的硬件的load、store类型的指令实现同步机制,不同的硬件的指令可能是不同的,这会增加许多烦恼,因此我们在硬件指令的基础上实现更为高级的锁原语,类似于Acquire()和Release()这样的简单原语。那么采用哪些方式进行实现是好的?
Naive use of Interrupt Enable/Disable
显然interrupt是从用户态转换到内核态的方法,也是切换CPU控制权的方式;试想一下,当我们获取锁之后,如果这期间发生了中断等时间使得core上运行的程序被切换,那么当前代码就会被停止执行,这就不是一个严格意义上的critical section了。
计时器中断会切换线程,这是为了确保所有线程都可以取得一些进度,这里禁用中断是为了确保在critical sec在被执行期间不会被打断。
所以我们首先尝试,在上锁的时候禁用interrupt,解锁后再启动interrupt,即直接使用禁用/启用中断作为锁的实现,很明显这是愚蠢的。
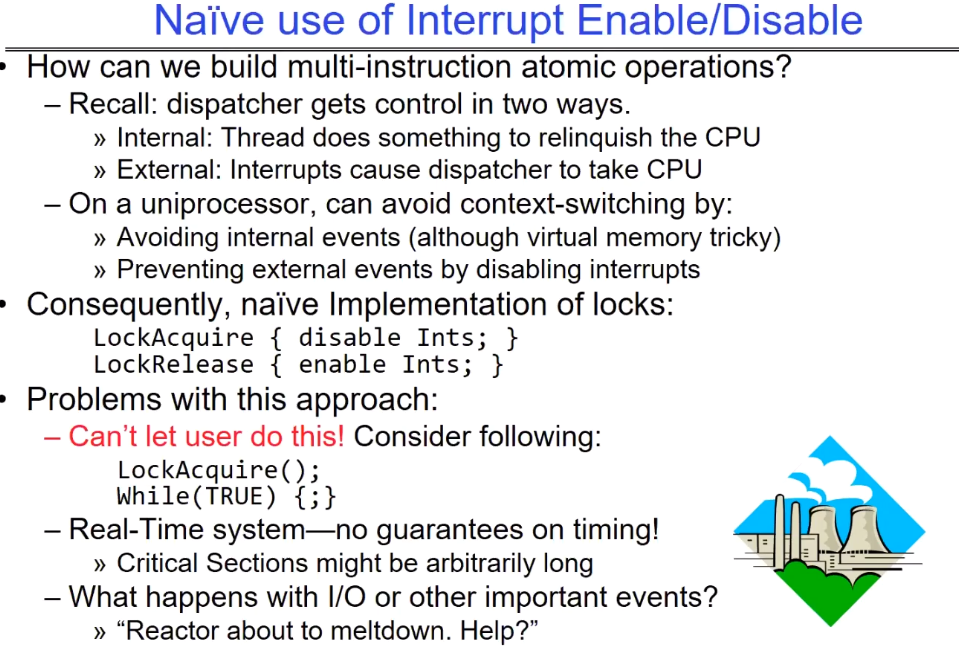
问题也很明显,让用户直接操作硬件是不可取的,这会导致系统运行出现错误,导致I/O事件不能被及时响应。
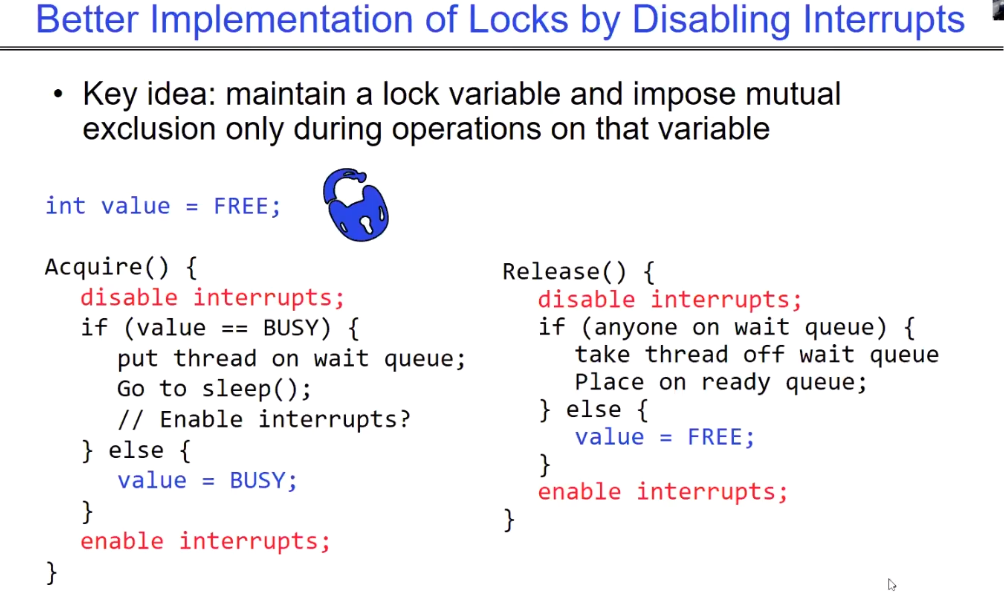
Better Implementation of locks by Disabling Interrrupts
与上面第一种方法的主要区别在于,我们维护一个锁变量,只有在对该变量操作的时候,才会启动critical section的环境,而critical section的实现方式就是使用中断。因此这里我们是借助中断实现Acquire和Release,上面的第一种方式是直接把中断的两种操作变成Acquire和Release。这种方案下,我们将对系统的影响降至了最小,我们不会将interrupts的禁用时间交给用户程序,而是交给OS实现的Acquire和Release,只在操作mutual var时会禁用中断。操作完毕后会马上启用中断。
- interrupts在这两个函数内部就相当于一把变相的Lock。
- 禁用interrupts期间该程序是独享CPU的,没有任何events可以把它换下来。
- value变量在这里是一个shared value,需要互斥访问。
- 程序能否获得锁取决于value当前的状态,与interrupts关系不是特别紧密,这样就极大地降低了对系统中其他需要中断的event上的影响。
Discussion about use interrupts
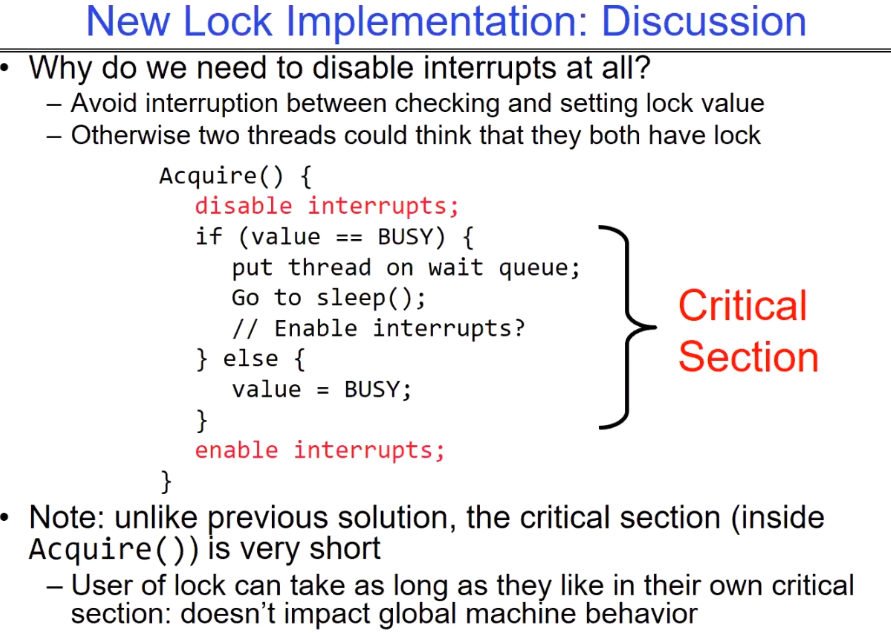
为什么需要在临界区完全禁用中断:
- 避免在检查和set lock值的时候发生中断,发生线程切换,从而打断操作。
- 否则当前临界区就不再是严格的临界区,这会出现多个线程可以同时操作lock的情况(操作value值)。
when re-enable interrupts is suitable?(at BUSY situation)
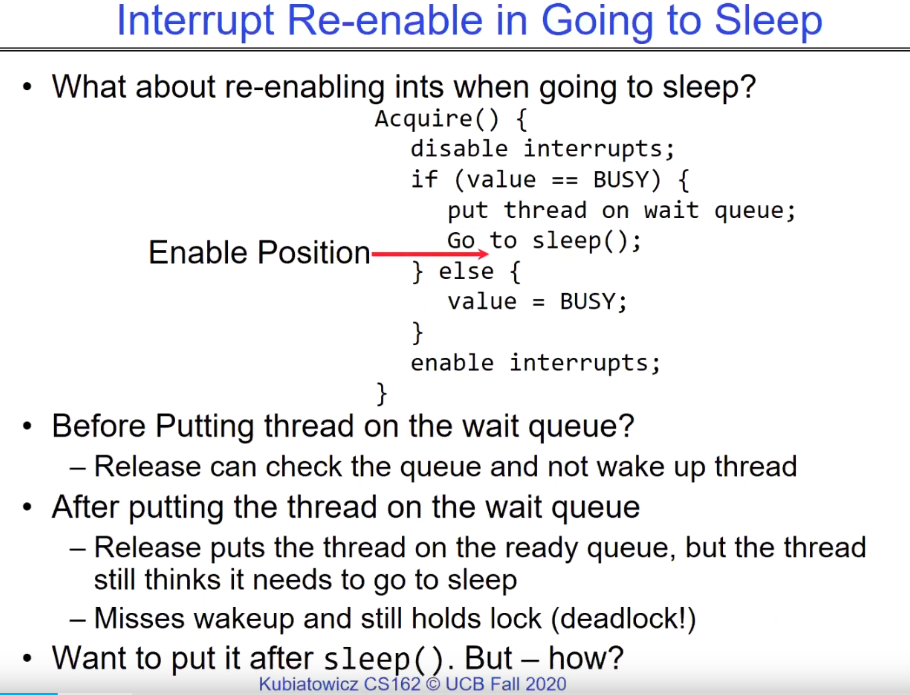
在value锁被占用的时候,我们应该什么时候启动中断:
- 若在put thread on wait queue之前:可能使用完锁线程的release会提前执行,导致该thread不会被唤醒。
- 在放到wait queue之后:另一线程使用完锁,执行release将该thread放入ready queue,但是该thread仍然认为自己需要休眠。如此一来该thread错过了唤醒机会,并且该thread理论上已经获得了这个锁,但是他会一直沉睡,而别的thread也会等待这个锁,因此会造成死锁。
- 如果在sleep()之后呢。事实上,OS中的启用中断确实是在sleep()之后进行的,但是是当该线程被再次唤醒的时候,具体见下文。
How to re—enable after Sleep()
sleep():当前线程被放到了等待队列上,它不会被调度,因此不会获得CPU周期。
kernel中的scheduler调度程序运行,这个过程不涉及到外部中断机制。
如下例所示,当TheadA发现锁已经被B占用了,那么他会在休眠之后,立即发上下文切换,切换到当前在ready queue中的线程,之后由这些ready queue中的线程(意味着已经sleep完毕)主动启动中断。总之:
- 启动中断应该交给下一个被唤醒的线程。
- 当一个休眠的线程被唤醒后,他会返回acquire操作并重新启动中断。
- 启动中断操作应该是被动的,触发条件是某个sleep thread被唤醒,之后他会返回到acquire操作,获取锁,最后启动中断 。休眠线程不该在sleep()是主动启用中断。

In-Kernel Lock: Simulation
这里举了一个在内核中调度线程的例子:A先运行,获取到value锁后,设置value=1,之后发生定时器中断,切换到B运行,B在Acquire中发现value=1,B会休眠;之后CPU使用权又回到A,A运行完毕后,调用Release(),当value=1时:
- 若wait queue上存在等待的线程,A会选择主动地唤醒一个在ready queue上的线程,之后结束运行。注意在wait queue上有线程存在的时候,value会一直为1,因为我们实际上是在传递value这把锁的所有权,value这把锁仍然是有人使用的,只不过发生了短暂的持有权传递。这不影响多线程并发运行的正确性。
- 若wait queue上没有正在等待的线程,那么A会设置value=1,因为此时没有可以传递锁持有权的对象,他会通过将value设置为1,从而将锁放回原处,等待下一个人来使用。
下图中的虚线意味着timer interrupt发生,进入内核态,scheduler调度Ready queue另一个线程到CPU Core上开始运行。

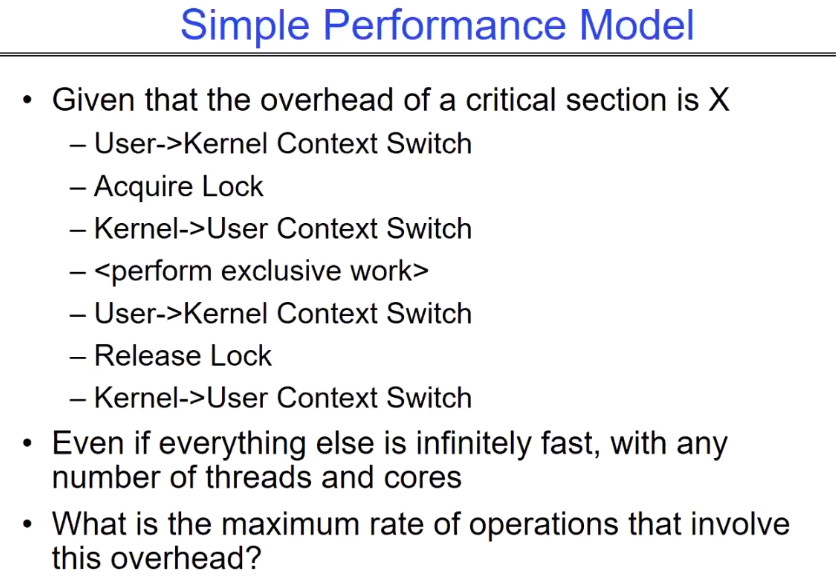
Simple Performance Model(based Acquire and Release)
意味着每一次对lock的操作都需要进行两次状态切换。这从本质上就限制了程序的最大运行速率。
系统调用的时间消耗大概是函数调用消耗的25倍。
Summary
之前的方案有如下几个缺点:
- 我们不能将中断的禁用启动权利交给users,这可能会打乱OS的运行。
- 在后面几种方案中进行了封装,但是基于中断的sync行为在多核处理器上十分浪费时间。
禁用所有处理器上的中断可能需要向每个处理器发送消息,因为每个禁用中断消息只会禁用一个CPU core的中断,并且可能需要在多个处理器之间进行协调和同步操作,这可能会非常耗时。这种耗时的原因包括:
-
多处理器之间的同步: 禁用中断可能需要在多个处理器之间进行同步和协调操作。这可能涉及到向每个处理器发送消息或命令,然后等待它们的响应。这种同步操作可能需要额外的时间来完成。
-
中断处理器的状态保存和恢复: 在禁用中断之前,通常需要保存处理器的状态,以便在需要时能够恢复它们。这可能涉及到保存处理器的寄存器状态、中断掩码和其他相关信息。保存和恢复这些状态可能需要额外的时间和处理器资源。
-
系统资源竞争: 如果在禁用中断时有其他系统活动正在进行,比如其他进程或线程正在竞争系统资源,那么禁用中断可能会引起资源竞争和延迟。
因此,禁用所有处理器上的中断可能会是一个耗时的操作,尤其是在多核处理器系统中。在实际系统中,需要权衡禁用中断带来的性能影响和系统响应性之间的平衡,以确保系统的稳定性和可靠性。
因此,基于内核的Acquire()和Release()无疑极大地限制了程序的运行能力,这意味着在单位时间内我们可以拥有的锁的数量是有限的。我们需要一些可以在user space使用的synchronization primitives(同步原语)。
next class:User space atomic structions
幸运的是,我们有atomic instruction sequences可以选择:
- 这些指令读取/写入一个值都是原子性的。
- 硬件确保了原子性。
- 可以在单处理器上确保原子性(不算太难)
- 可以在多个处理器上确保原子性(需要cache coherence(缓存一致性)协议的帮助)
- 相比于基于中断的方案,atomic指令的优势在于,可以同时作用于单处理器和多处理器的系统,确保操作的原子性。
下次我们将讨论可以在用户态运行的atomic Read/Modify/Write 指令。