Graph: Spanning Trees;Topological Sort;Implementations of Graph
Minimum Spanning Trees and Kruskal’s Algorithm
先介绍什么是最小生成树,之后介绍Kruskal算法来找到最小生成树。
Spanning Trees(生成树)
一个图的生成树:意味着需要从原图中提取出边的子集,这些子集可以确保每个顶点都可以相互到达,即这些子集边生成的图是连通图,且图中无环,总结来说生成树就是用某个图的边的子集生成的连通无环图。
Minimum spanning tree(最小生成树)
该生成树使用的边的子集的权重和是所有可能的生成树中最小的 ;如果图是无权重图,那么就是该生成树使用到的边的数量是最少的。
可以用最小生成树来生成迷宫,而具有最小生成树性质的迷宫只会有一条路可以走到固定的点。
Kruskal’s algorithm
该算法可以在给定的图中找出最小生成树。下面给出Kruskal算法的伪代码:
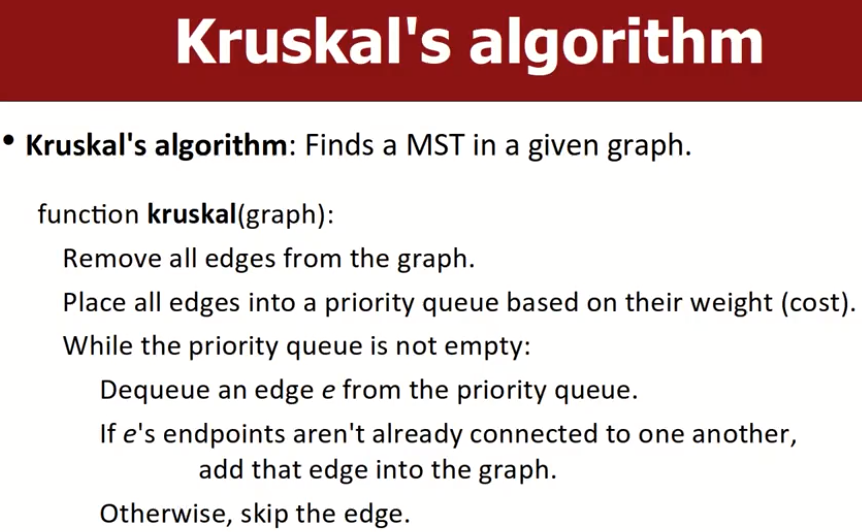
要做的有如下几步,输入是一个固定的图:
- 首先将图中所有的边都拿出来,按照权重从小到大依次放入一个priority queue中。
- 当pqueue不为空时:
- 从pqueue中取出一个边e。
- 如果e边的两个端点还没有连通(即有路径可以让两个点互相到达),那么这条边就留下。
- 如果e边的两个端点已经连通了,就放弃这个边。
Topological Sort
基本思想
拓扑排序,通常用来排序具有依赖关系的任务。给定一个有向图G=(V,E),使用拓扑排序可以得到一个图中所有顶点的总排序,这个总排序的特点是,对于图中的每一条边<V,E>(从V指向E),在这个排序中,V节点总是在W节点的前面。
总的来说,如果存在一堆任务,但是这些任务存在依赖关系,即有些任务必须在某些任务执行完成后才能继续执行,拓扑排序可以用来为这些任务找到一个合适的执行序列。当然结果可能不唯一。
拓扑排序算法是一个综合称呼,有多种具体的实现。
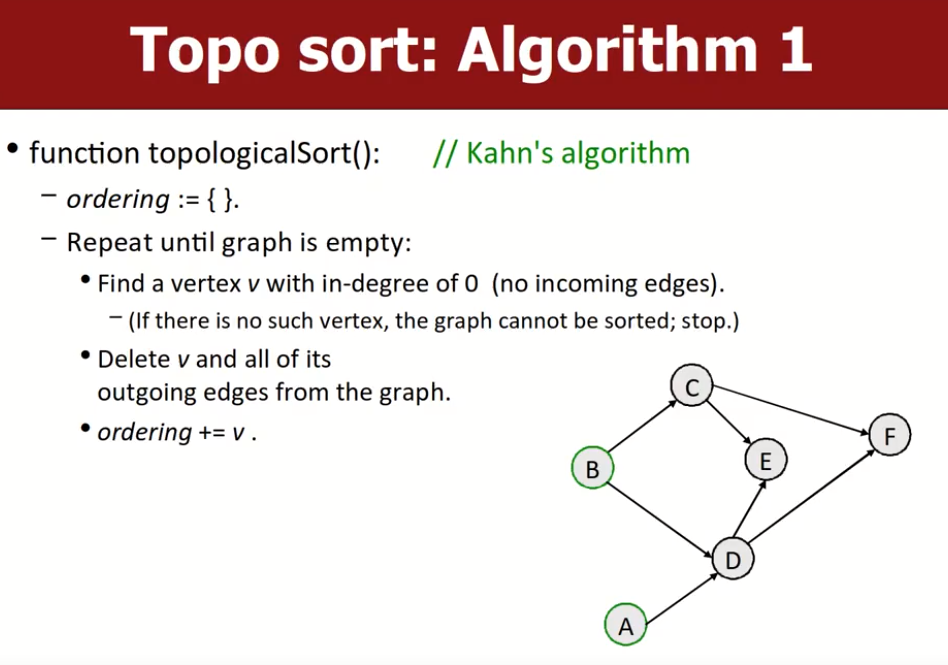
方法1:kahn’s algorithm
重复以下过程,直到图为空:
- 找到一个入度为0的顶点v(如果图中没有这种顶点,说明图中有环,且图不能被进行拓扑排序,终止搜索)
- 删除顶点v和图中从顶点开始的所有边。
- 将顶点v放入最终排序列表中。
如果不制作副本,这种方法会破坏原有图像。
修正版算法(思路相同,实现不同)
方法1会破坏原有的图像,我们不想在拓扑排序期间从图中删除顶点或边,也不想再重新制作一个图(这种操作往往取决于库,有时候很难制作副本),因此可以采用如下的修正算法:
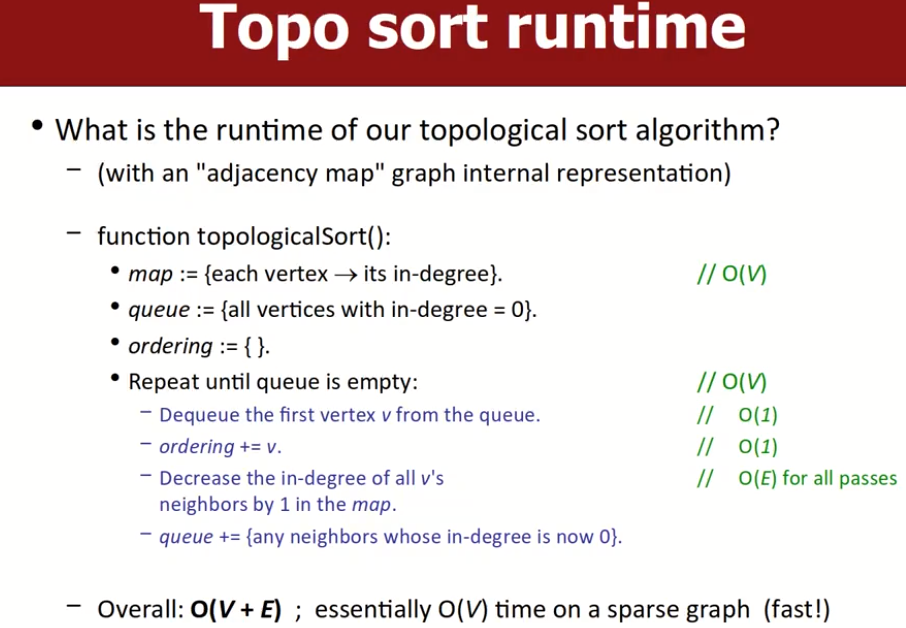
首先初始化三个变量:
map:顶点->对应的入度。queue:存放所有入度为0的节点。ordering:存放最终的排序结果。
重复下列过程,直到queue为空:
- 从queue中弹出第一个节点v,放到ordering中。
- 将map中存储的节点v的所有邻居节点的入度-1。
- 如果上一步操作中产生了入度为0的节点,将节点放到queue中。
如果所有的节点都被处理了,成功。否则意味着图中有环。
拓扑排序的复杂度分析
首先要查看所有的节点:O(V)。在第三步中把节点v的所有邻居节点的入度-1的操作需要查看所有的边:O(E)。因此综合下来就是O(V+E)。
Graph Implementations
首先,没有一种图的实现方式可以做到完美适配所有的图算法,因此这里介绍三种普遍使用的图实现策略:
edge list。adjacency list。(邻接表)adjacency matrix。(邻接矩阵)
edge list
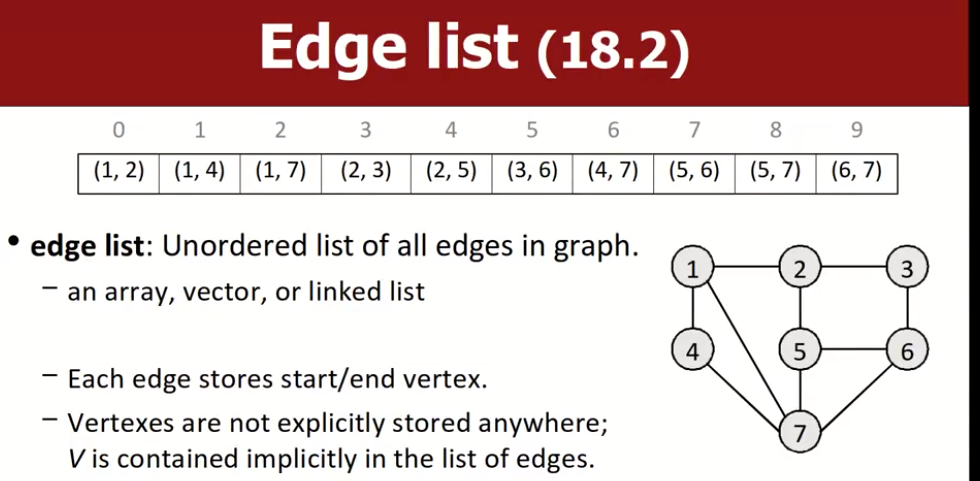
优势就是方便直接遍历所有的边;劣势就是:难以知道目标顶点的邻居、目标顶点的入度、出度等等,大多数操作都得遍历所有的边。这种方法有点蠢。
Adjacency list(邻接表)
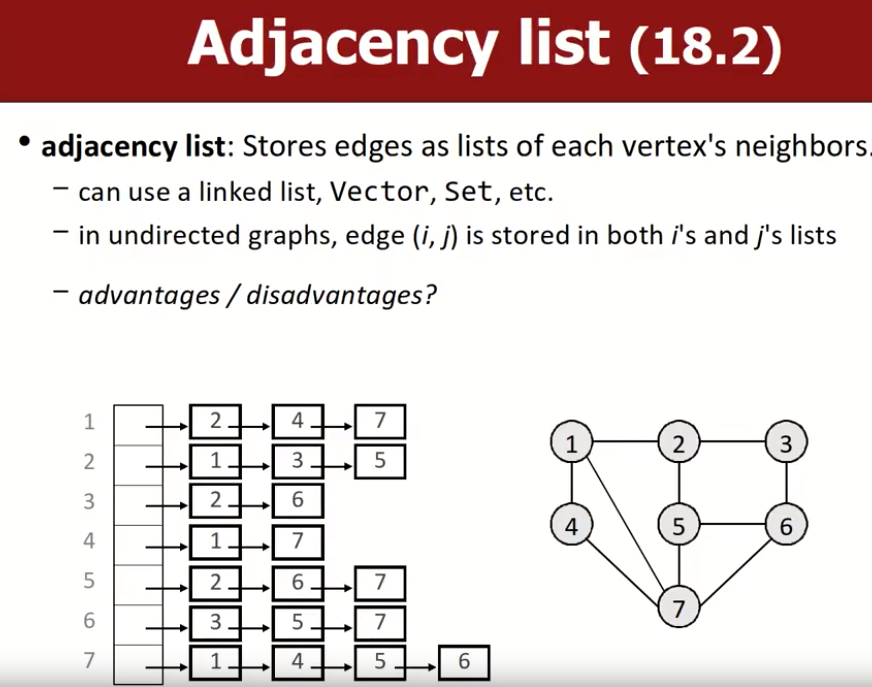
邻接表:每个顶点都用一个数据结构(链表、vector、set等)来存储自己所有的邻居节点。邻居节点有序存储。
优点是容易找到每个节点的邻居,容易增加节点。缺点是删除节点不方便,有向图中找节点入度不方便,确定两个顶点是否连通不方便。
Adjacency matrix
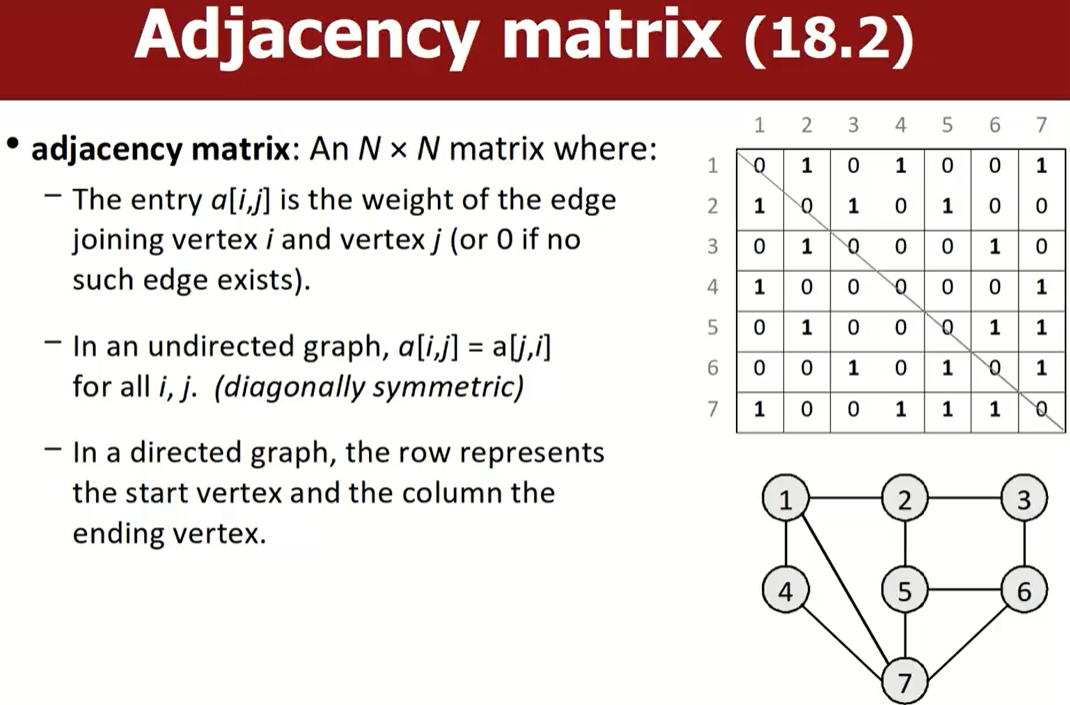
邻接矩阵,假设有N个顶点,那么矩阵就是N*N的:
- a[i,j]代表了从顶点i到顶点j的边的权重(如果边不存在,则该值为0)。
- 在无向图中,
a[i,j]=a[j,i](对角对称)。 - 在一个有向图中,行索引代表了start vertex,列索引代表了ending vertex。
便于添加/删除边,判定两个节点是否是邻居非常快。